2024年12月1日付にて,
モビリティシステム研究グループ(鈴木・奥田研)に,本田康平助教が就任しました.
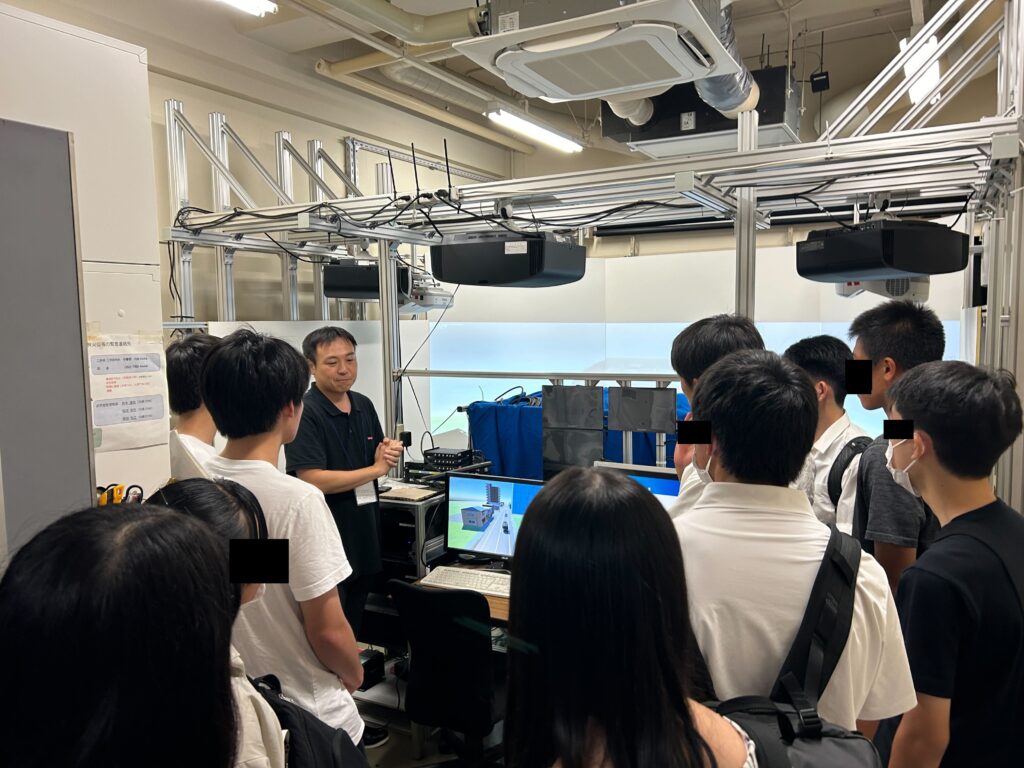
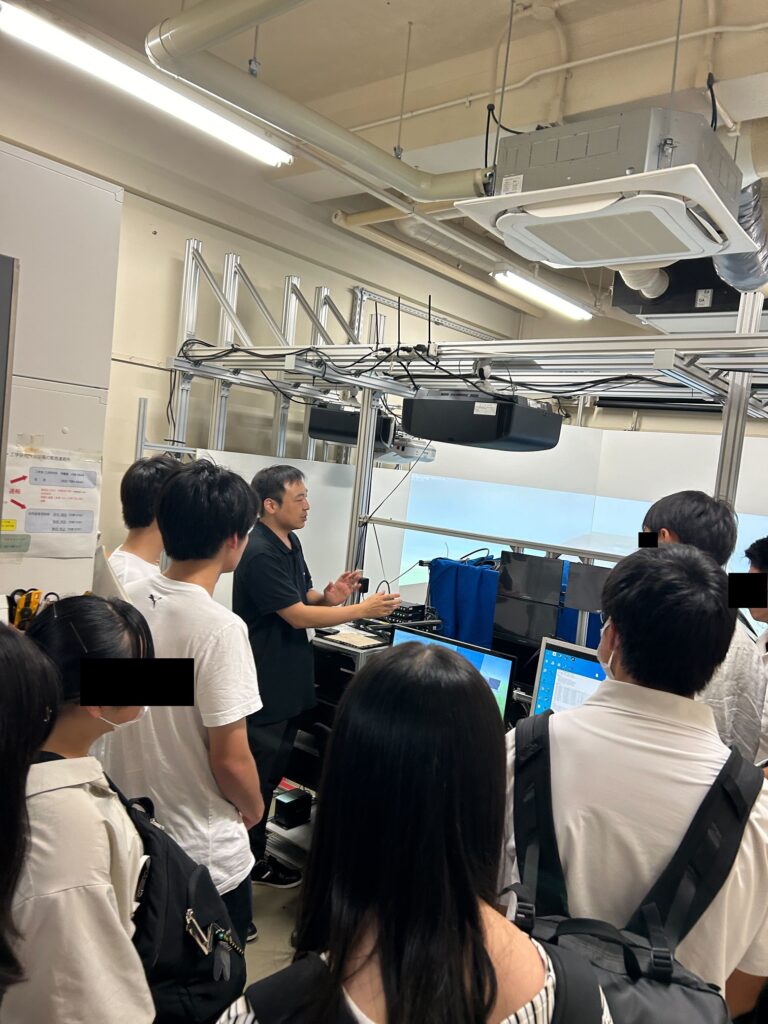
オープンキャンパスで研究室公開を実施しました
たくさんの方に来ていただきましてありがとうございます.

自動車技術会の2024年春季講演会での発表の結果,
モビリティシステム研究Gの社会人博士 脇坂君が
学術講演会 優秀講演発表賞受賞の受賞の通知を頂きました.
講演タイトル
「無信号交差点での順⾏左折⾞両に対するサイクリストの加減速判断の分析とモデル化」
脇坂 ⿓ (名古屋大学大学院工学研究科・トヨタテクニカルディベロップメント株式会社)
なお,授賞式は2025 年5 ⽉22 ⽇(⽊)春季⼤会会場(パシフィコ横浜)の予定です.
おめでとうございます!
当研究室の,Arun Muraleedharan,奥田准教授,鈴木教授が
計測自動制御学会(SICE)論文賞の受賞通知を受理しました.
(8月29日,SICE Annual Conferenceにて表彰の予定です.)
アルンムラリーダラン, 奥田裕之, 鈴木達也, “モデル予測制御による歩行者への配慮を意識した自動運転の設計”,
計測自動制御学会論文集, Vol.59, No.11, pp.472-483, 2023
Arun Muraleedharan, Hiroyuki Okuda, Tatsuya Suzuki, “Pedestrian-aware Model Predictive Controller for Design of Considerate Autonomous Driving”
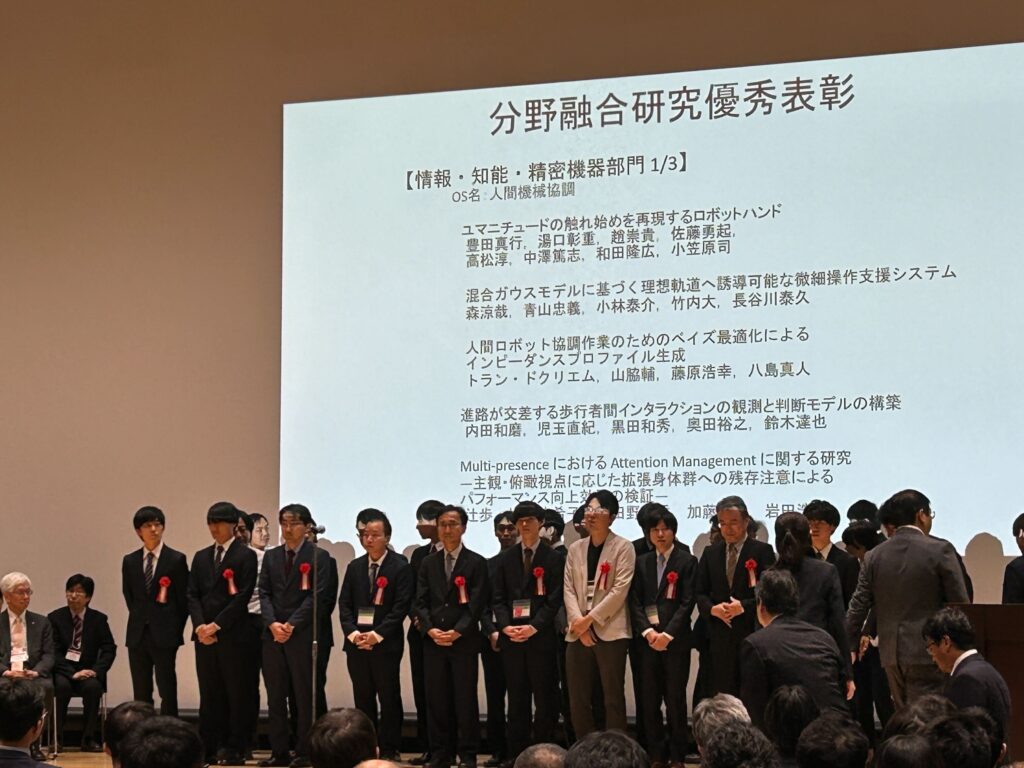
モビリティシステム研究G(鈴木・奥田研)の内田くん,星野くんが,
Robomech 2023にて発表した下記の研究が,Robomech 2023 分野融合研究優秀表彰
として表彰されました.
内田和磨、児玉直紀、黒田和秀、奥田裕之、鈴木達也
「進路が交差する歩行者間インタラクションの観測と判断モデルの構築」
(Observation of Pedestrian Interactions at Crossroads and Development of a Model for Pedestrian Decision-Making )
(分野融合研究優秀表彰,若手優秀講演フェロー賞)
星野航輝,本田康平,青木瑞穂,奥田裕之,鈴木達也
「矩形形状を考慮した衝突回避による狭駐車場への自動駐車の実車検証」
(Actual-Vehicle Verification of Automatic Parking in Narrow Spaces
Considering Precise Collision Avoidance Constraints for Rectangular Objects)
(分野融合研究優秀表彰)

鈴木研の実験室内の360°カメラ映像を
名大広報室からアップいただきました,MEIDAism2025に掲載予定とのことです.
実験室内の様子がよくわかりますね
https://theta360.com/s/pLniQxvl2KKlZfW4KG3APkl4i
モーターファン・イラストレーテッド (Motor Fan illustrated) Vo. 206 (2023/12/29発行) のコラム,
「大学研究室探訪」にて,鈴木研とGREMO・TMIの活動が紹介されます.
ぜひご覧ください.
http://suzlabtemp.sakura.ne.jp/wp-content/uploads/2023/11/motorfan_illustrated_206.pdf
モーターファンイラストレーテッド公式
モビリティシステム研究Gの杉浦君が,
IFACの国際会議ICINCOにて発表しました.
Evaluation of Controllability of Interaction Between Pedestrian and Autonomous Mobile Robot in Shared Mobility Space
Kentaro Sugiura, Mizuho Aoki, Kazuhide Kuroda, Hiroyuki Okuda, Tatsuya Suzuki
20th International conference on informatics in control, automation and robotics(ICINCO23), 4A-RP-60, Rome, Italy, Nov. 13-15(14), 2023

4月2日の午前,大学院入試説明会が開催されますが,午後に研究室見学会が実施されます.
鈴木研ではハイブリッドでの研究室見学を実施します.
対面参加
- 場所:工学2号館1F 114号室(北玄関そば)
- 開催予定時間:①15:00~ ②15:30~ ③16:00~ ④16:30~ 全4回
- 新型コロナウイルスに関連し,当日は密を避けるため,
各回10名程度を大幅に超える場合は整理券を配布させていただき,
他の時間帯に回っていただく場合があります. - 必ずマスク着用でご参加ください.また体調不良の方はオンラインでの参加を
お願いします.
オンライン参加
- 上記の対面実施の①③回目について,オンラインでの同時配信を行います.
- 説明会会場の現地カメラ,説明資料の共有,実験装置見学ツアーの配信,
を行う予定です. - URL:https://zoom.us/j/97368360972
- パスコード:721778
- ※入試説明会・見学会に申し込みしていない方も,オンライン見学会には参加いただけます.飛び込み参加も可です.
鈴木研の石黒 達也君(博士前期課程2年)が「射影変換を用いた障害物回避制約を考慮したモデル予測型自動駐車用経路生成法の提案」の発表に関して, 日本機械学会 若手優秀講演フェロー賞を受賞しました.